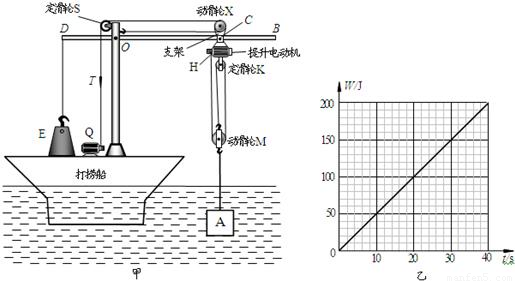
如圖甲是海洋中學科技小組設計的打撈水中物體的裝置示意圖.DB是以O點為轉軸的水平杠桿,OD的長度為1.6m.水平甲板上的配重E通過細繩豎直拉著杠桿D端,配重E的質量m
E為225kg.安裝在杠桿DB上的行走裝置由支架、動滑輪X、提升電動機、定滑輪K構成,行走裝置的質量m為25kg.電動機Q可以通過定滑輪S和動滑輪X拉動行走裝置沿BO水平滑動.固定在提升電動機下的定滑輪K和動滑輪M組成滑輪組Y,當行走裝置處于杠桿DB上C點的位置時,提升電動機拉動繩子H端,通過滑輪組Y豎直提升水中的物體A.物體A完全在水中勻速上升的過程中,滑輪組Y的機械效率為η
1,甲板對配重E的支持力為N
1;物體A全部露出水面勻速豎直上升的過程中,滑輪組Y的機械效率為η
2,甲板對配重E的支持力為N
2.滑輪組Y提升物體A的過程中,行走裝置受到的水平拉力始終為零,杠桿DB在水平位置保持平衡.已知物體A的質量m
A為50kg,體積V為20dm
3,N
1與N
2之比為3:2,η
1與η
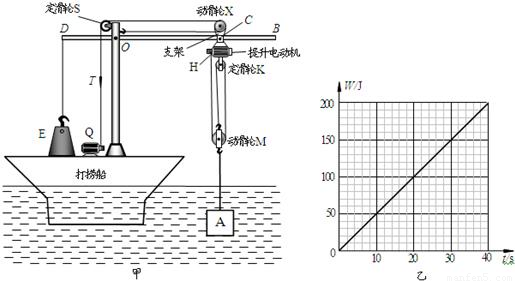
2之比為9:10.物體A被打撈出水面后,停留在一定高度,電動機Q開始拉動行走裝置.在行走裝置以0.05m/s的速度水平勻速移動的過程中,拉力T所做的功隨時間變化的圖象如圖乙所示,行走裝置受到的水平拉力為F.細繩和杠桿的質量、滑輪與軸的摩擦、水對物體的阻力均忽略不計,g取10N/kg.
求:(1)OC的長度;
(2)拉力F.