題目列表(包括答案和解析)
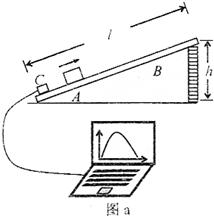
如圖a所示,裝有位移傳感器發射器的、質量為M的滑塊A放在氣墊導軌BC為位移傳感器的接收器,它能將A到C的距離數據實時傳送到計算機上,經計算機處理后在幕上顯示滑塊A的位移-時間(s-t)圖像和速率-時間(v-t)圖像。整個裝置置于高度可調節的面上,斜面的長度為L、高度為h。(取重力加速度g=10m/s2,結果保留一位有效數字)

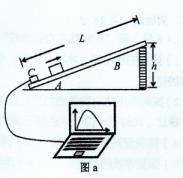
(1)現給滑塊A一沿氣墊導軌向上的初速度,A的v-t圖像如圖b所示。從圖線可得滑塊A下滑時的加速度a=____m/s2,從圖線還可知摩擦力對滑塊A運動的影響______。(填“明顯,不可忽略”或“不明顯,可忽略”)
(2)此裝置還可用來驗證牛頓第二定律。實驗時,通過改變______,可以驗證質量一定時,加速度與力成正比的關系;通過改變______,可以驗證力一定時,加速度與質量成反比的關系(用L、h、M字母表示)
(3)將氣墊導軌換成滑板,給滑塊A一沿滑板向上的初速度,A的s-t圖像如圖c所示。圖線不對稱是由于______造成的,通過圖像可求得滑板的傾角θ=_____(用反三角函數表示),滑塊與滑板間的動摩擦因數μ=____。
如圖a所示,裝有位移傳感器發射器的、質量為M的滑塊A放在氣墊導軌B上,C為位移傳感器的接收器,它能將滑塊A到傳感器C的距離數據實時傳送到計算機上,經計算機處理后在屏幕上顯示滑塊A的位移-時間(s-t)圖像和速率-時間(v-t)圖像。整個裝置置于高度可調節的斜面上,斜面的長度為L高度為h。(取重力加速度g=10m/s2,結果保留—位有效數字)
(1)現給滑塊A一沿氣墊導軌向上的初速度,A的v-t圖像如圖b所示。從圖線可得滑塊A下滑時的加速度a=
m/s2。
(2)此裝置還可用來驗證牛頓第二定律。實驗時,通過改變h,可以驗證質量—定時,加速度與力成正比的關系;通過改變 ,可以驗證力一定時,加速度與質量成反比的關系。(用L、h、M字母表示)
(3)將氣墊導軌換成滑板,給滑塊A—沿滑板向上的初速度,A的s-t圖像如圖C所示。通過圖像可求得滑板的傾角θ= (用反三角函數表示),滑塊與滑板間的動摩擦因數μ= 。
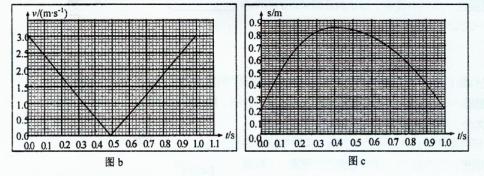
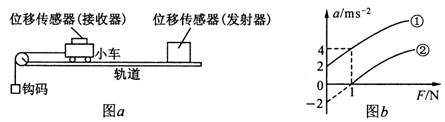
(10分)某實驗小組設計了如圖 a所示的實驗裝置,用鉤碼所受重力作為小車所受的拉力,用DIS測小車的加速度.通過改變鉤碼的數量,多次重復測量,可得小車運動的加速度a和所受拉力 F的關系圖像.他們在軌道水平和傾斜的兩種情況下分別做實驗,得到了兩條 a-F圖線,如圖 b所示.
(1)圖線 是在軌道右側抬高成為斜面情況下得到的.(選填“①”或“②”)
(2)隨著鉤碼的數量增大到一定程度時圖 b中的圖線明顯偏離直線,造成此誤差的主要原因是所掛鉤碼的總質量太大,為消除此誤差可采取的最為簡便且有效的措施是
A.調整軌道的傾角,在未掛鉤碼時使小車能在軌道上長時間緩慢運動(即小車與傳感器發射部分的重力沿軌道方向的分力恰與其所受摩擦力平衡)
B.在增加鉤碼數量進行實驗的同時在小車上增加砝碼,使鉤碼的總質量始終遠小于小車與傳感器接收部分的總質量
C.在鉤碼與細繩之間放置一力傳感器,直接得到小車運動的加速度 a和力傳感器讀數F的關系圖像
D.更換實驗中使用的鉤碼規格,采用質量較小的鉤碼進行上述實驗
(3)測得小車和位移傳感器接收部分的總質量m= kg;滑塊和軌道間的動摩擦因數μ= .
(10分)某實驗小組設計了如圖a所示的實驗裝置,用鉤碼所受重力作為小車所受的拉力,用DIS測小車的加速度.通過改變鉤碼的數量,多次重復測量,可得小車運動的加速度a和所受拉力F的關系圖像.他們在軌道水平和傾斜的兩種情況下分別做實驗,得到了兩條a-F圖線,如圖b所示.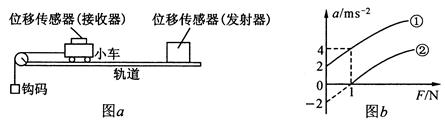
(1)圖線 是在軌道右側抬高成為斜面情況下得到的.(選填“①”或“②”)
(2)隨著鉤碼的數量增大到一定程度時圖b中的圖線明顯偏離直線,造成此誤差的主要原因是所掛鉤碼的總質量太大,為消除此誤差可采取的最為簡便且有效的措施是
| A.調整軌道的傾角,在未掛鉤碼時使小車能在軌道上長時間緩慢運動(即小車與傳感器發射部分的重力沿軌道方向的分力恰與其所受摩擦力平衡) |
| B.在增加鉤碼數量進行實驗的同時在小車上增加砝碼,使鉤碼的總質量始終遠小于小車與傳感器接收部分的總質量 |
| C.在鉤碼與細繩之間放置一力傳感器,直接得到小車運動的加速度a和力傳感器讀數F的關系圖像 |
| D.更換實驗中使用的鉤碼規格,采用質量較小的鉤碼進行上述實驗 |
(10分)某實驗小組設計了如圖 a所示的實驗裝置,用鉤碼所受重力作為小車所受的拉力,用DIS測小車的加速度.通過改變鉤碼的數量,多次重復測量,可得小車運動的加速度a和所受拉力 F的關系圖像.他們在軌道水平和傾斜的兩種情況下分別做實驗,得到了兩條 a-F圖線,如圖 b所示.
(1)圖線 是在軌道右側抬高成為斜面情況下得到的.(選填“①”或“②”)
(2)隨著鉤碼的數量增大到一定程度時圖 b中的圖線明顯偏離直線,造成此誤差的主要原因是所掛鉤碼的總質量太大,為消除此誤差可采取的最為簡便且有效的措施是
A.調整軌道的傾角,在未掛鉤碼時使小車能在軌道上長時間緩慢運動(即小車與傳感器發射部分的重力沿軌道方向的分力恰與其所受摩擦力平衡)
B.在增加鉤碼數量進行實驗的同時在小車上增加砝碼,使鉤碼的總質量始終遠小于小車與傳感器接收部分的總質量
C.在鉤碼與細繩之間放置一力傳感器,直接得到小車運動的加速度 a和力傳感器讀數F的關系圖像
D.更換實驗中使用的鉤碼規格,采用質量較小的鉤碼進行上述實驗
(3)測得小車和位移傳感器接收部分的總質量m= kg;滑塊和軌道間的動摩擦因數μ= .
湖北省互聯網違法和不良信息舉報平臺 | 網上有害信息舉報專區 | 電信詐騙舉報專區 | 涉歷史虛無主義有害信息舉報專區 | 涉企侵權舉報專區
違法和不良信息舉報電話:027-86699610 舉報郵箱:58377363@163.com