【題目】很多國家發射地球同步衛星時,先將衛星發射至近地圓形軌道1運行,然后在Q點點火,使其沿橢圓軌道2運行,最后在P點再次點火,將衛星送入同步圓形軌道3運行,如圖所示。已知軌道1、2相切于Q點,軌道2、3相切于P點.若只考慮地球對衛星的引力作用,則衛星分別在1、2、3軌道上正常運行時,下列說法正確的是( )

A.若衛星在1、2、3軌道上正常運行時的周期分別為T1、T2、T3,則有T1>T2>T3
B.衛星沿軌道2由Q點運動到P點時引力做負功
C.根據公式v=ωr可知,衛星在軌道3上的運行速度大于在軌道1上的運行速度
D.根據![]() 可知,衛星在軌道2上任意位置的速度都小于在軌道1上的運行速度
可知,衛星在軌道2上任意位置的速度都小于在軌道1上的運行速度
科目:高中物理 來源: 題型:
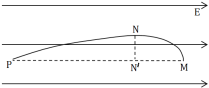
【題目】如圖所示,在水平向右的勻強電場中,質量為![]() 的帶電小球,以初速度v從
的帶電小球,以初速度v從![]() 點豎直向上運動,通過
點豎直向上運動,通過![]() 點時,速度大小為2v,方向與電場方向相反,而后到達與
點時,速度大小為2v,方向與電場方向相反,而后到達與![]() 點在同一水平面上的P點,軌跡如圖。其中N/是N點在MP直線上的投影點。以下關于小球的運動說法正確的是( )
點在同一水平面上的P點,軌跡如圖。其中N/是N點在MP直線上的投影點。以下關于小球的運動說法正確的是( )
A.從M到N重力勢能增加![]()
B.從M到N機械能增加2mv2
C.從M到P動能增加8mv2
D.重力與電場力大小之比為1:2
查看答案和解析>>
科目:高中物理 來源: 題型:
【題目】空間站中不能利用天平測量質量,為此某同學為空間站設計了如圖(a)所示的實驗裝置,用來測量小球質量。圖中彈簧固定在擋板上,光滑軌道B處裝有光電門,可以測量出小球經過光電門的時間。該同學設計的主要實驗步驟如下:

①用游標卡尺測量小球的直徑d
②將彈簧左端固定在檔板上
③小球與彈簧接觸并壓縮彈簧,記錄壓縮量x
④由靜止釋放小球,測量小球離開彈簧后經過光電門的時間t
⑤改變彈簧的壓縮量,重復步驟③、④多次
⑥分析數據,得出小球的質量
已知彈簧彈性勢能![]() ,
,![]() 為勁度系數,
為勁度系數,![]() 為形變量。該同學使用了一個已知勁度系數為
為形變量。該同學使用了一個已知勁度系數為![]() 的彈簧進行了上述實驗,請回答下列問題
的彈簧進行了上述實驗,請回答下列問題
(1)步驟①中游標卡尺示數情況如圖(b)所示,小球的直徑d=____cm;
(2)某一次步驟④中測得小球通過光電門的時間t為5.00 ms,則此次小球離開彈簧的速度v=_____m/s;
(3)根據實驗步驟中測得的物理量,則可得小球的質量m=_____。(用實驗步驟①、③、④中測得的物理量表示)
查看答案和解析>>
科目:高中物理 來源: 題型:
【題目】如圖甲為新裝的一批節能路燈,該路燈通過光控開關實現自動控制:電燈的亮度可自動隨周圍環境的亮度改變而改變.如圖乙為其內部電路簡化原理圖,電源電動勢為E,內阻為r,Rt為光敏電阻(光照強度增加時,其電阻值減小).現增加光照強度,則下列判斷正確的是( )

A. 電源路端電壓不變 B. B燈變暗,A燈變亮
C. R0兩端電壓變大 D. 電源總功率不變
查看答案和解析>>
科目:高中物理 來源: 題型:
【題目】某同學使用多用電表粗略測量一定值電阻的阻值:
(1)表內電池的 極與紅表筆相連;
(2)先把選擇開關旋到“×1k”擋位,測量時指針偏轉如圖所示。請你簡述接下來的測量過程:


①斷開待測電阻,將選擇開關旋到 ;
②將兩表筆短接, ;
③再接入待測電阻,重新讀數;
④測量結束后,將選擇開關旋到OFF檔。
(3)表盤的示數如圖,則電阻值是 Ω。
(4)接下來采用“伏安法”較準確地測量該電阻的阻值,所用實驗器材如下圖所示。其中電壓表內阻約為5kΩ,電流表內阻約為5Ω 。圖中部分電路已經連接好,請完成實驗電路的連接。

查看答案和解析>>
科目:高中物理 來源: 題型:
【題目】如圖所示,平行板電容器的兩個極板A、B分別接在電壓為60V的恒壓電源上,兩極板間距為3cm,電容器帶電荷量為6×10-8C,A極板接地.求:

(1)平行板電容器的電容;
(2)平行板電容器兩板之間的電場強度;
(3)距B板2cm的M點處的電勢.
查看答案和解析>>
科目:高中物理 來源: 題型:
【題目】如圖所示,兩個定值電阻R1、R2串聯后接在電壓U穩定于12V的直流電源上,有人把一個內阻不是遠大于R1、R2的電壓表接在R1兩端,電壓表的示數為8V.如果他把電壓表改接在R2兩端,則電壓表的示數將( )

A. 大于4V小于8VB. 等于4V
C. 小于4VD. 等于或大于8V
查看答案和解析>>
科目:高中物理 來源: 題型:
【題目】如圖所示,在水平圓盤上沿半徑方向放置用細線相連的質量均為m的A、B兩個物塊(可視為質點)。A和B距軸心O的距離分別為rA=R,rB=2R,且A、B與轉盤之間的最大靜摩擦力都是fm,兩物塊A和B隨著圓盤轉動時,始終與圓盤保持相對靜止。則在圓盤轉動的角速度從0緩慢增大的過程中,下列說法正確的是( )

A.B所受合力一直等于A所受合力
B.A受到的摩擦力一直指向圓心
C.B受到的摩擦力先增大后不變
D.A、B兩物塊與圓盤保持相對靜止的最大角速度ωm= ![]()
查看答案和解析>>
科目:高中物理 來源: 題型:
【題目】“新冠肺炎”的易傳染性讓每一個接觸到病毒的人都有可能成為被感染的對象。如果在一些易傳播的環境中啟用機器人替代人工操作的話,就可以有效防控病毒傳播,其中送餐服務就是機器人應用的一個領域,只要設置好路線、安放好餐盤,它就會穩穩地舉著托盤,到達指定的位置送餐,如圖所示。若某一隔離病區的配餐點和目標位置在相距x0=39.25m的直線通道上,機器人送餐時從靜止開始啟動,勻加速過程的加速度大小![]() ,速度達到
,速度達到![]() 后勻速運動,之后適時勻減速,恰好把食物平穩送到目標位置,整個送餐用時t0=40s。若載物平臺呈水平狀態,食物的總質量
后勻速運動,之后適時勻減速,恰好把食物平穩送到目標位置,整個送餐用時t0=40s。若載物平臺呈水平狀態,食物的總質量![]() ,食物與平臺無相對滑動,g取10m/s2。試求:
,食物與平臺無相對滑動,g取10m/s2。試求:
(1)機器人勻加速過程位移的大小x1;
(2)勻速運動持續的時間t;
(3) 勻減速過程中平臺對食物的作用力F大小(結果可保留根號)。

查看答案和解析>>
湖北省互聯網違法和不良信息舉報平臺 | 網上有害信息舉報專區 | 電信詐騙舉報專區 | 涉歷史虛無主義有害信息舉報專區 | 涉企侵權舉報專區
違法和不良信息舉報電話:027-86699610 舉報郵箱:58377363@163.com
